当人形『机器人』️从实验室走向家庭、工业与商业场景,硬件构造的设计取舍成为其适配不同需求的核心密码。
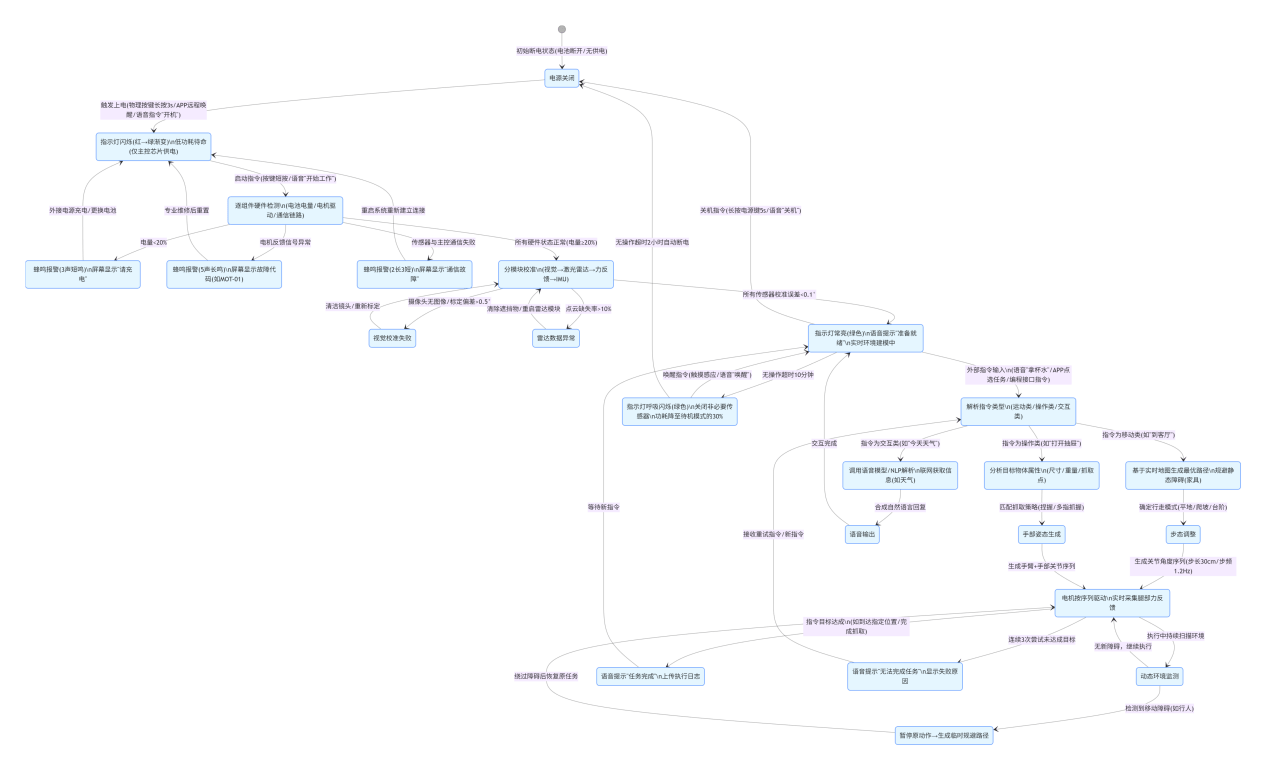
人形『机器人』️上电运行的标准化流程图
小鹏 IRON、宇树 Unitree H2、特斯拉擎天柱(Optimus)与 1X-Neo 四款标杆产品,既循着 “仿人适配” 的共性逻辑搭建基础架构,又在动力系统、结构设计与感知交互上走出差异化路径 —— 它们的硬件差异,藏着场景定位的深层考量;而那些共通的技术选择,则预示着人形『机器人』️产业的发展共识。
以下,我们便深入解析一下四款产品的硬件构造,探寻其相同内核与差异逻辑。
小鹏 IRON、宇树 Unitree H2、特斯拉擎天柱(Optimus)、1X-Neo 四款人形『机器人』️,均以 “仿人适配人类场景” 为核心设计逻辑,在硬件架构上形成共性基础,但因技术路线、场景定位与核心目标差异,在关键部件选型、结构设计等方面呈现显著分化,具体分析如下:
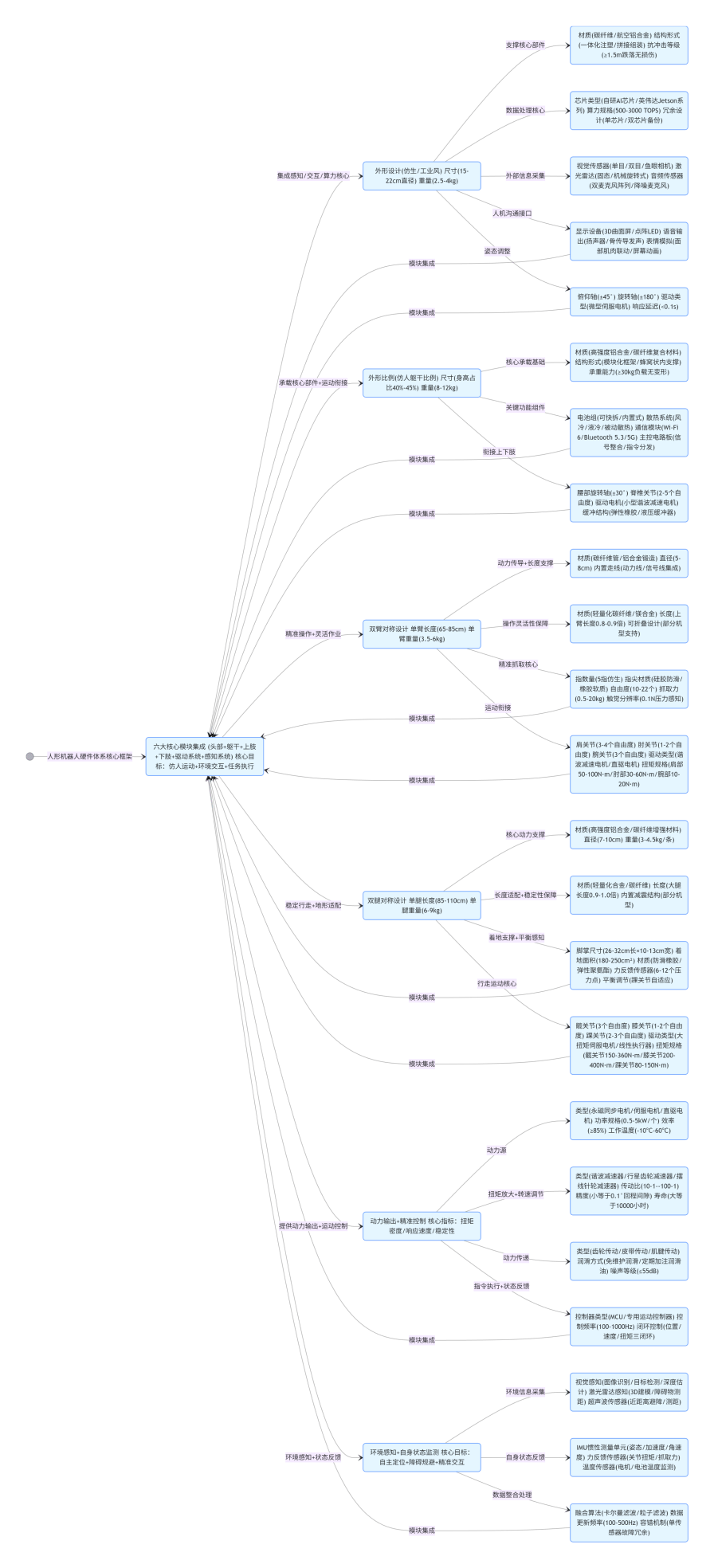
人形『机器人』️硬件体系核心框架
jrhz.info一、硬件构造相同点
类人核心架构统一:四款『机器人』️均采用 “头部 - 躯干 - 四肢” 的仿生形态设计,以双足行走、上肢操作为核心功能导向,通过关节驱动系统实现姿态调整与动作执行,本质是通过硬件复刻人类运动逻辑,适配家庭、工业、商业等人类主导的场景环境。
感知系统核心组件同源:均搭载视觉传感器(摄像头 / 双目相机📷️)、激光雷达 / 深度相机📷️等核心感知设备,部分配备麦克风阵列与力反馈传感器,通过多模态数据融合实现环境识别、目标定位与交互响应,为自主决策提供硬件支撑。
电动驱动与电池储能共识:均摒弃传统液压驱动,采用 “电机 + 减速器” 的电动驱动架构,以可充电电池为能量来源,聚焦动力输出、续航能力与安全性优化,核心目标是满足实际场景下的长时间稳定运行需求。
算力依赖专用『芯片』支撑:均搭载高性能 AI 『芯片』,无论是自研『芯片』还是成熟商用『芯片』,均以支撑多任务并行运算、运动控制与环境感知协同为核心目标,算力水平与场景复杂度、动作精细度强相关。
二、硬件构造差异点
(一)核心动力与算力系统
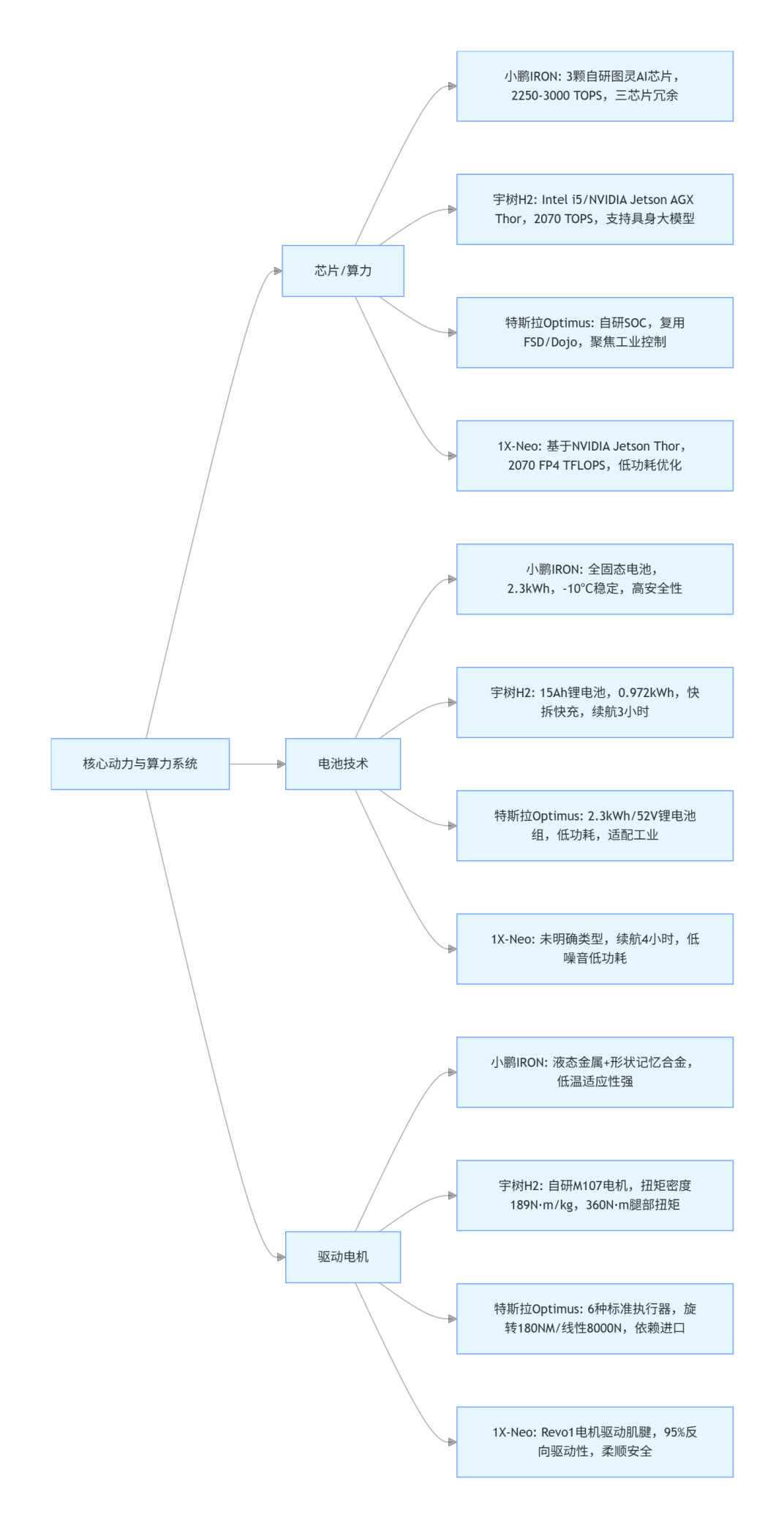
ai『机器人』️-核心动力与算力系统对比图
维度
小鹏IRON
宇树UnitreeH2
特斯拉Optimus
1X-Neo
『芯片』 / 算力
3 颗自研图灵 AI 『芯片』,总算力 2250 TOPS(部分来源显示 3000TOPS),支持多任务并行运算,三『芯片』冗余设计提升稳定性,独立决策无需依赖云端
标配 Intel Core i5,可选配 NVIDIA Jetson AGX Thor 『芯片』,算力达 2070 TOPS,支持部署具身智能大模型,兼顾基础控制与高阶智能需求
搭载特斯拉自研 SOC 『芯片』,复用汽车 FSD 系统与 Dojo 超算平台,算力聚焦工业场景动作控制与环境建模,强调算法复用性
基于 NVIDIA Jetson Thor 的 1X Neo Cortex 计算平台,AI 算力 2070 FP4 TFLOPS,适配家庭场景低功耗与实时响应需求
电池技术
行业首发全固态电池,能量密度达 2.3kWh,重量降低 30%、电量提升 30%,250℃高温耐受、3mm 针刺不起火,安全性突出,续航与 Optimus 相当
15Ah(0.972KWh)低内阻优质锂电池,最大电压 75.6V,续航约 3 小时,支持快拆与快速充电
2.3kWh/52V 锂电池组,静坐功耗 100W、慢走功耗 500W,适配工业场景长时间作业需求
未明确电池类型与容量,续航 4 小时,聚焦家庭场景低功耗设计,运行噪音仅 22 分贝
驱动电机
液态金属驱动 + 形状记忆合金驱动器,肩部动力单元低温适应性强,-10℃仍能保持 95% 动力输出,融合汽车底盘控制技术精准调节关节扭矩
自研 M107 关节电机,峰值扭矩密度 189N・m/kg,腿部关节最大扭矩 360N・m,采用工业级交叉滚子轴承,高精度高承载
六种标准执行器(3 种旋转 + 3 种线性),旋转执行器最大扭矩 180NM,线性执行器最大驱动力 8000N,依赖进口谐波减速器与行星滚柱丝杠
自研高扭矩密度 Revo1 电机驱动肌腱执行器,实现 95% 反向驱动性与低惯性,动作柔顺安全,适配人机近距离交互
(二)结构设计与自由度
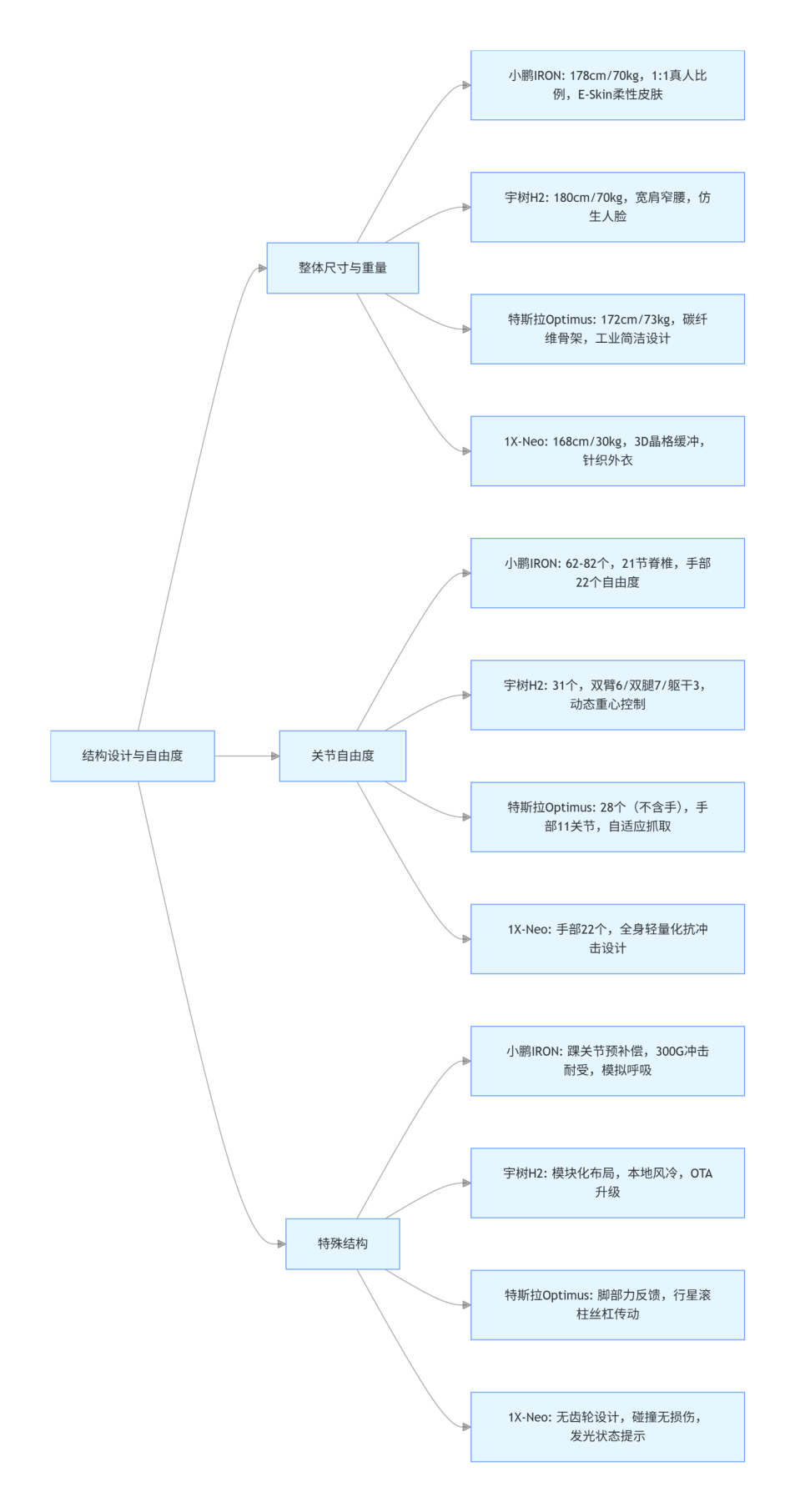
ai『机器人』️-结构设计与自由度对比图
维度
小鹏IRON
宇树UnitreeH2
特斯拉Optimus
1X-Neo
整体尺寸与重量
身高 178cm,体重 70kg,1:1 真人比例,0.62 黄金腰臀比,全身覆盖 1.2mm 厚 E-Skin 柔性皮肤,内置微型气泵模拟呼吸起伏
身高 180cm,体重 70kg,宽肩窄腰设计,配备仿生人脸,支持 20 余种面部肌肉联动,外观贴近人类真实形态
身高 172cm,体重 73kg,白色主色调 + 碳纤维骨架,工业设计简洁,聚焦功能实用性
身高 168cm,体重 30kg,小巧灵动,内部为 3D 晶格聚合物缓冲结构,外部覆盖可机洗针织外衣与鞋子
关节自由度
全身 62-82 个主动自由度(定义标准差异),仿生脊椎含 21 节碳纤维椎骨,腰部扭转角度 ±45°,手部 22 个自由度,指尖触觉分辨率 0.1N
共 31 个自由度,双臂各 6 个、双腿各 7 个、躯干 3 个,含 2 个动态重心控制关节,动作流畅性与协调性显著提升,可完成舞蹈、武术等复杂动作
全身 28 个自由度(不含灵巧手),手臂各 7 个、大腿各 6 个、腰部 2 个;灵巧手 6 个自由度、11 个关节,支持自适应抓取
手部 22 个自由度(拇指 3 个、其余四指各 4 个 + 手腕 3 个),全身结构侧重轻量化与抗冲击,适配家庭环境人机共存
特殊结构设计
独创 “踝关节预补偿算法”,行走速度 0.8m/s,髋部摆动幅度 15°,步态自然度接近人类,可承受 300G 加速度冲击与 180℃高温
模块化布局,电池组与主控板集中于胸腔,本地风冷散热,支持 OTA 算法升级与二次开发,保留 “远程介入 + 自主运行” 双模操控
脚部力反馈传感器 + 2 轴平衡设计,线性执行器采用行星滚柱丝杠提升传动精度,硬拉能力 68 公斤、负重 20 公斤
无齿轮设计,柔性材料全覆盖,碰撞无损伤,配备 Emotive Ear Rings 发光耳朵,接管状态时发绿光提示
(三)感知与交互硬件
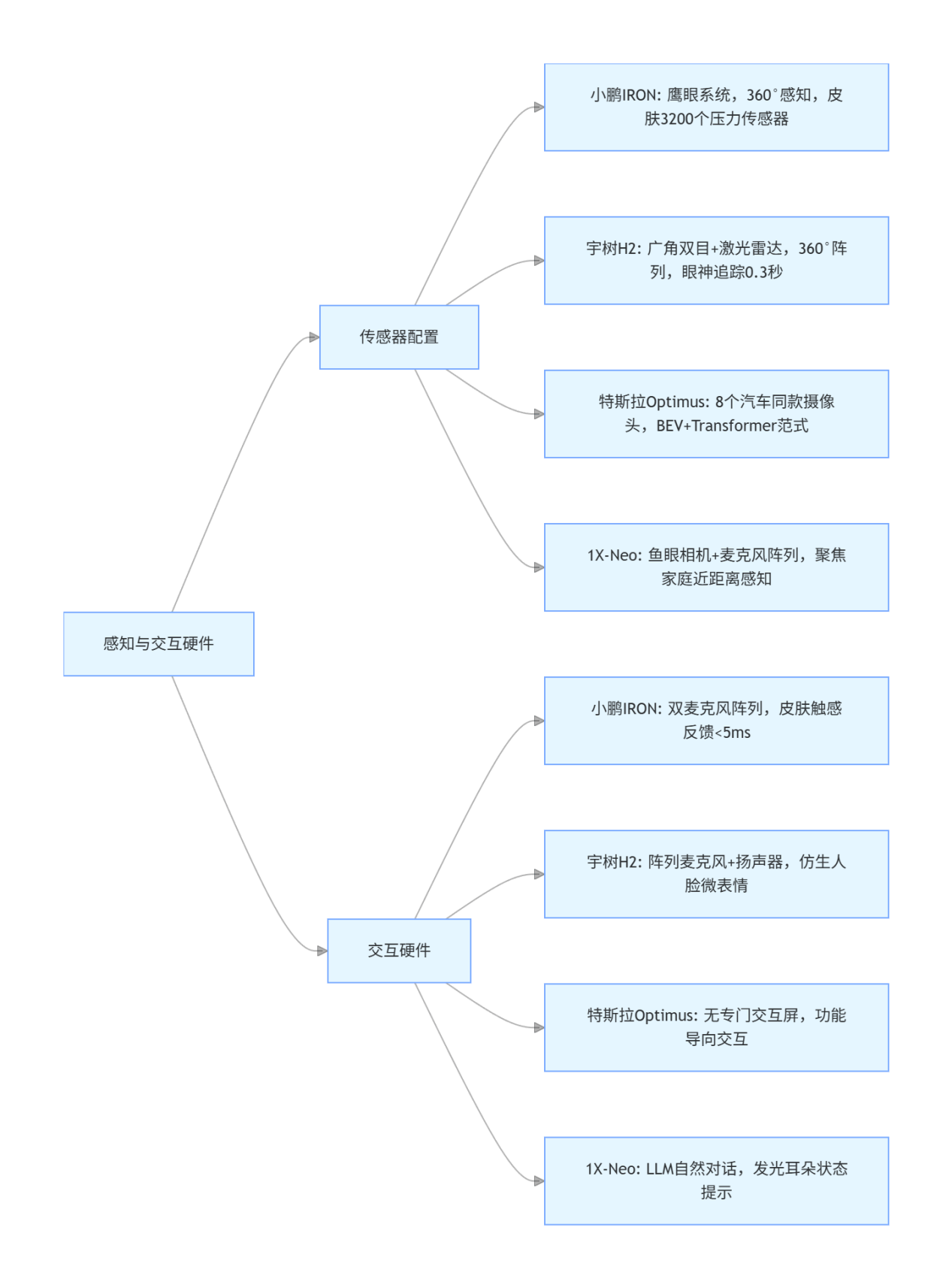
ai『机器人』️-感知与交互硬件对比图
维度
小鹏IRON
宇树UnitreeH2
特斯拉Optimus
1X-Neo
传感器配置
复用小鹏智驾鹰眼系统,头部集成视觉传感器、毫米波雷达、鱼眼相机📷️,360 度无死角感知,识别准确率 98%,皮肤内置 3200 个压力传感器与 1500 个温度传感器
广角人形双目相机📷️ + 3D 激光雷达 + 深度相机📷️,组成 360 度感知阵列,配备力反馈传感器与惯性测量单元(IMU),眼神追踪延迟 0.3 秒
8 个特斯拉汽车同款摄像头,基于 BEV+Transformer 感知范式,复用汽车自动驾驶感知技术,擅长时序环境建模
鱼眼摄像头 + 四个麦克风 + 三个扬声器,聚焦家庭场景近距离交互感知,支持精准抓取与语音控制
交互硬件
头部 “耳朵” 实为双麦克风阵列,支持听觉交互,皮肤触感反馈延迟小于 5ms,可模拟人类被触摸时的反应
阵列麦克风 + 大功率扬声器,支持语音交互,仿生人脸可实现微表情模拟,提升人机交互亲切感
无专门交互显示屏,侧重工业场景功能实现,通过动作执行与环境反馈完成交互
内置 LLM 支持自然对话,发光耳朵提示设备状态,操作方式包括点击按钮与语音命令
三、差异核心逻辑
场景导向差异:
小鹏 IRON 聚焦 “高拟真 + 全场景适配”,兼顾商业服务与工业场景,以拟真度和安全性突破人机交互壁垒;
宇树 H2 主打 “高性价比 + 运动性能”,侧重舞蹈、特种作业等动态场景;
特斯拉 Optimus 锚定 “工业规模化应用”,复用汽车技术降低成本,聚焦重复劳动与危险任务;
1X-Neo 专攻 “家庭服务场景”,以轻量化、低噪音、高安全性为核心,适配家务自动化与人机近距离共存。

ai『机器人』️-主板电源管理模块拓扑图
技术路线差异:
小鹏、特斯拉依赖母公司产业积累(汽车智驾、『芯片』技术),走 “全栈自研 + 技术复用” 路线;
宇树坚持 “自研核心部件 + 国产化替代”,控制成本同时提升运动性能;
1X-Neo 侧重 “仿生驱动 + 柔性结构”,以肌腱驱动和缓冲材料突破家庭场景安全瓶颈。
优先级差异:
小鹏优先 “拟真度与极端环境适应性”(全固态电池、柔性皮肤);
宇树优先 “运动灵活性与性价比”(高扭矩电机、模块化设计);
特斯拉优先 “规模化与通用性”(标准化执行器、算法复用);
1X-Neo 优先 “安全性与低干扰”(柔性结构、低噪音驱动)。
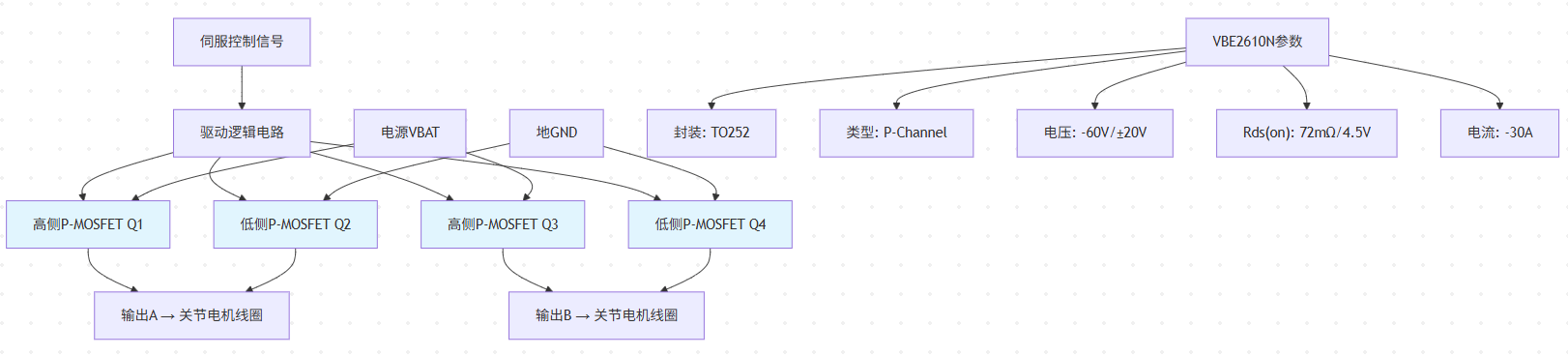
ai『机器人』️-关节伺服驱动模块拓扑图
从全固态电池到肌腱驱动,从 82 个自由度到 30kg 轻量化设计,小鹏 IRON、宇树 H2、特斯拉 Optimus 与 1X-Neo 的硬件差异,本质是 “场景需求” 与 “技术基因” 共同作用的结果 —— 小鹏靠汽车产业积累突破拟真与安全瓶颈,宇树以国产化自研平衡性能与性价比,特斯拉用技术复用降低规模化门槛,1X-Neo 则用柔性设计打开家庭场景缺口。
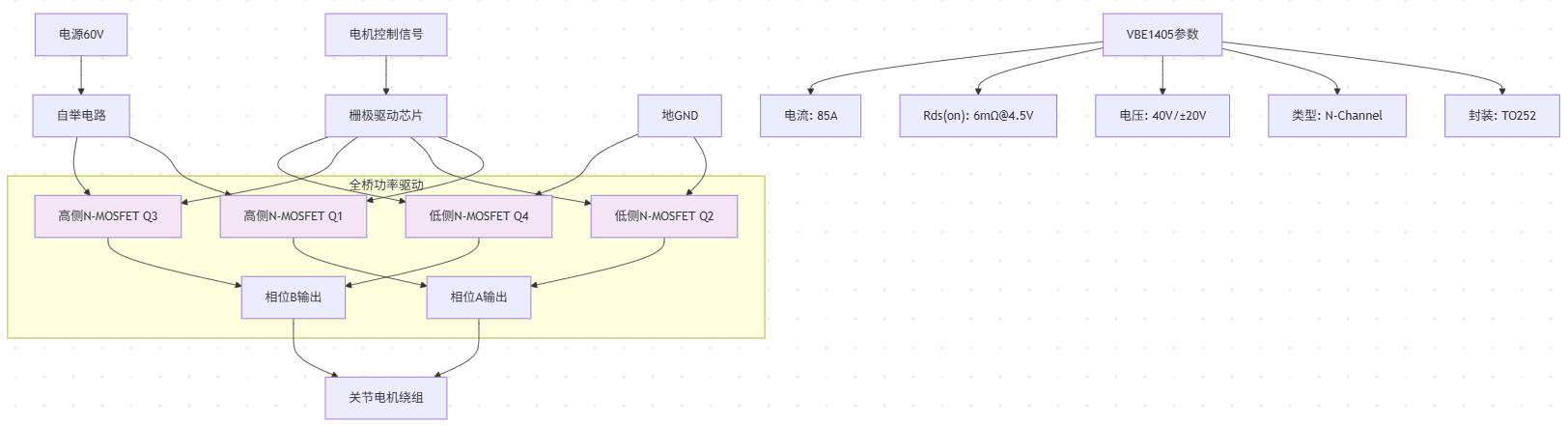
ai『机器人』️-关节电机驱动模块拓扑图
而它们的共性选择(电动驱动、多模态感知、AI 算力支撑),早已勾勒出人形『机器人』️硬件的核心共识:以 “仿人” 为基础,以 “场景适配” 为导向,在动力、结构、感知的协同优化中,实现 “实用化” 与 “商业化” 的双重突破。
未来,随着电池能量密度、电机扭矩密度与传感器精度的持续升级,人形『机器人』️将在 “更轻、更灵、更安全、更便宜” 的赛道上加速内卷,而那些能精准平衡技术性能与场景需求的硬件方案,终将成为撬动产业落地的关键支点。




