在人口增长与耕地资源收紧的双重压力下,育苗作为农业生产的 “最初一公里”,其效率与精准度直接决定了作物的最终产量与品质。传统育苗依赖人工经验调控温湿度、水肥配比,不仅误差大、成本高,更难以应对规模化种植的标准化需求。而智慧育苗数字孪生系统,正是通过将物理育苗场景与数字虚拟空间深度融合,让 “毫米级调控、全流程可视、智能化决策” 成为现代农业育种的新标配。
图扑 HT 数字孪生技术,为智慧育苗搭建了 “虚实共生” 的管理底座 —— 它以三维可视化形式复刻物理育苗车间的每一处细节,同时打通传感器、机械臂、水肥系统的实时数据,让管理者无需亲临现场,就能在数字界面中完成 “观察 - 分析 - 干预” 的全链条操作。这种技术重构,既解决了传统育苗 “看不见、摸不准、调不细” 的痛点。
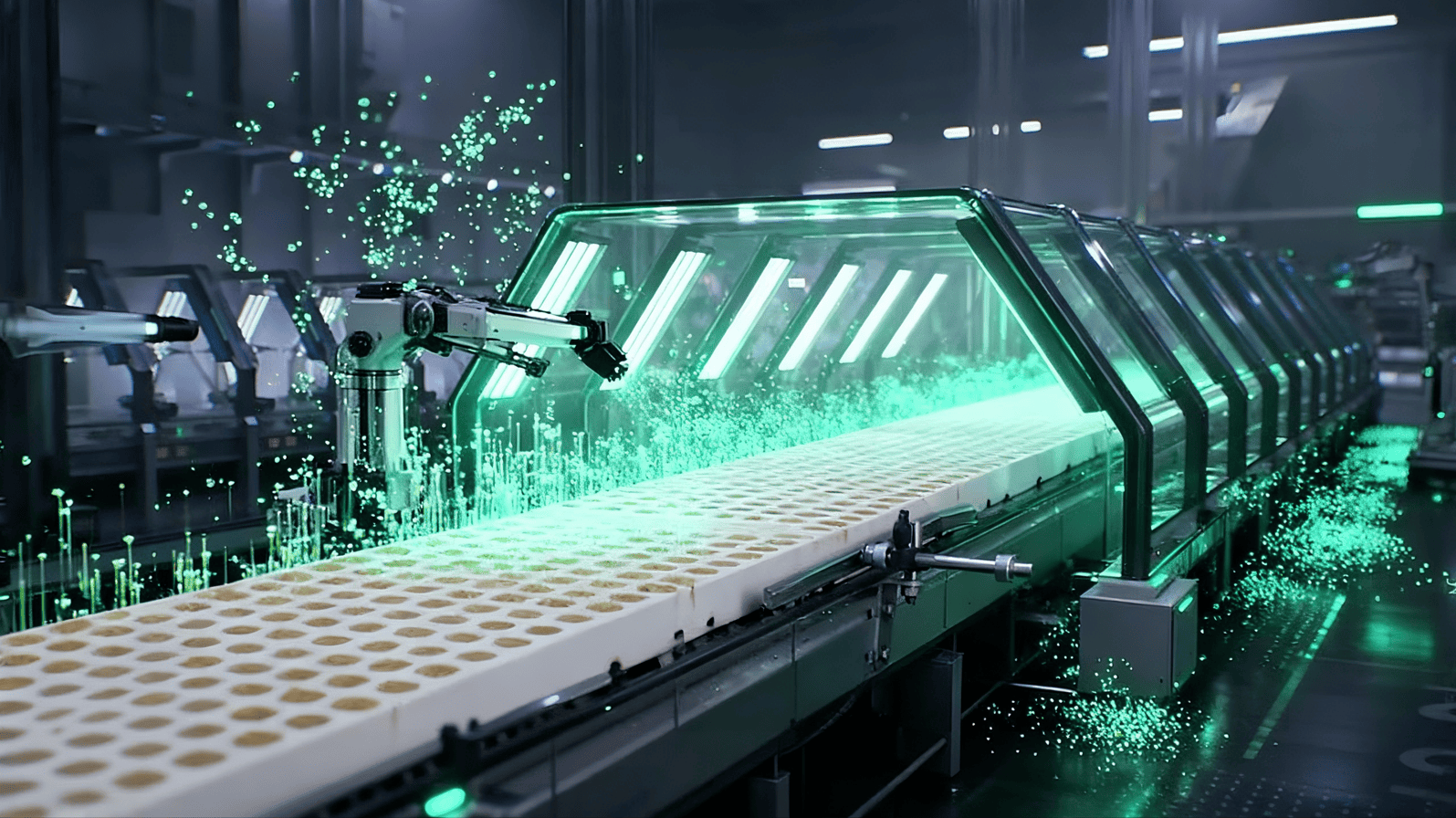
智慧育苗数字孪生系统是对物理场景的高精度还原—— 从育苗架的排布、机械臂的关节角度,到每一个育苗穴盘的孔隙尺寸,都在数字空间中形成了可交互的 “镜像”。
在图扑 HT 构建的可视化界面中,车间的蓝白金属机架泛着冷调光泽,水肥管道的走向与阀门状态清晰可见;育苗穴盘中的基质湿度、温度数据,会以动态光影的形式附着在穴盘表面:穴盘边缘会浮现淡红色预警光晕,同时触发系统的自动『补水』指令。而机械臂的每一次抓取、移动,都会在数字空间中同步呈现关节的转动轨迹,管理者甚至能通过放大视角,观察机械爪与穴盘接触的压力参数。
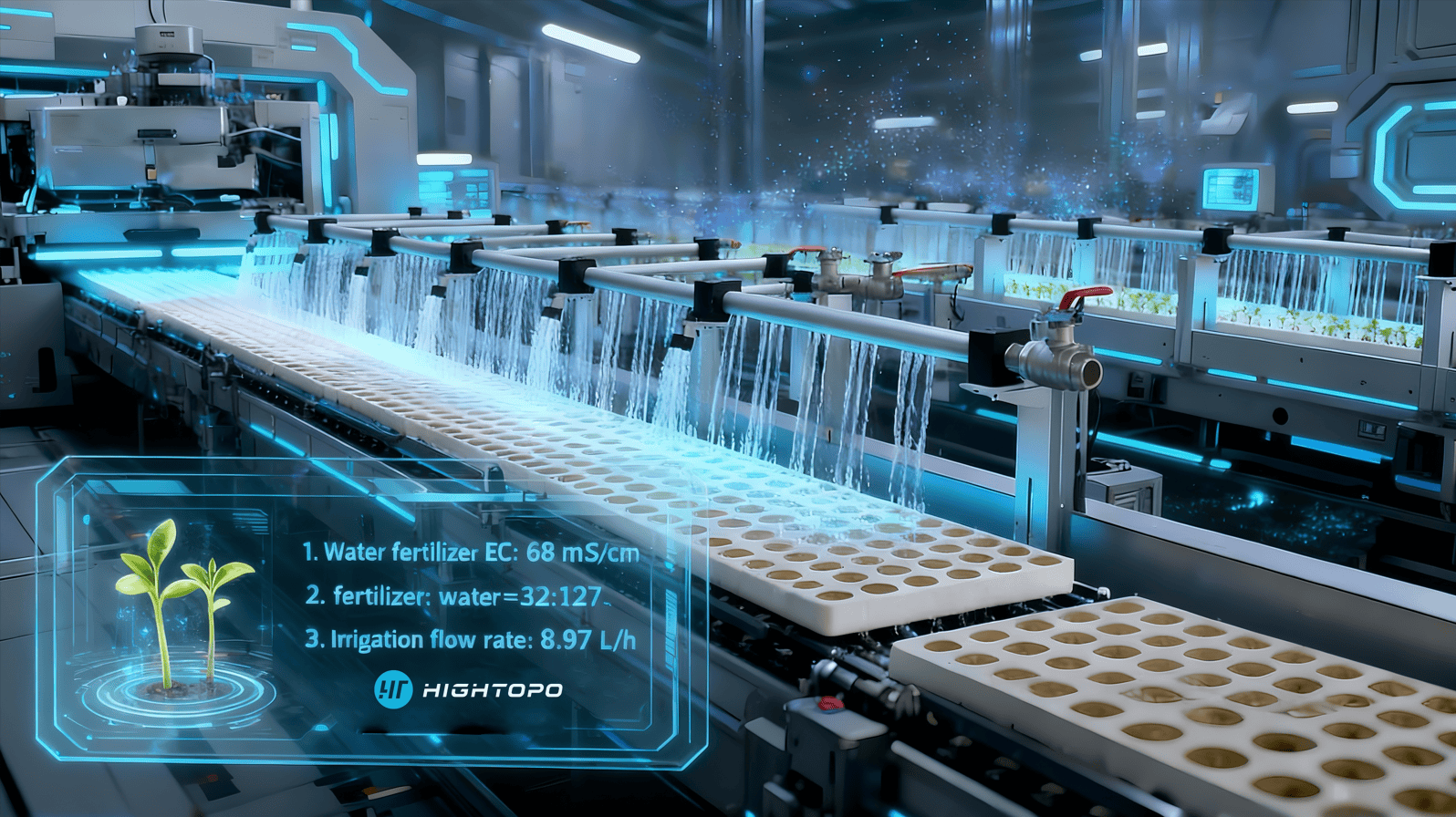
jrhz.info图扑 HT 界面显示,系统会实时采集育苗基质的 EC 值(水肥浓度)、灌溉流量数据(如界面中标注的,并与数字模型中的作物生长曲线比对 —— 幼苗生长速率低于模型阈值时,系统会自动调整该区域的水肥配比,同时联动补光系统增加光照时长。整个过程无需人工干预,数字空间的参数调整会直接同步到物理设备,让每一株幼苗都能获得适配其生长阶段的资源供给。
育苗车间的机械臂、传送带等设备,在数字孪生系统中形成了 “协同网络”:当某一批幼苗达到移栽标准时,数字系统会自动规划机械臂的移动路径 —— 避开正在『补水』的管道区域,以最优关节角度抓取穴盘,并同步控制传送带调整速度。
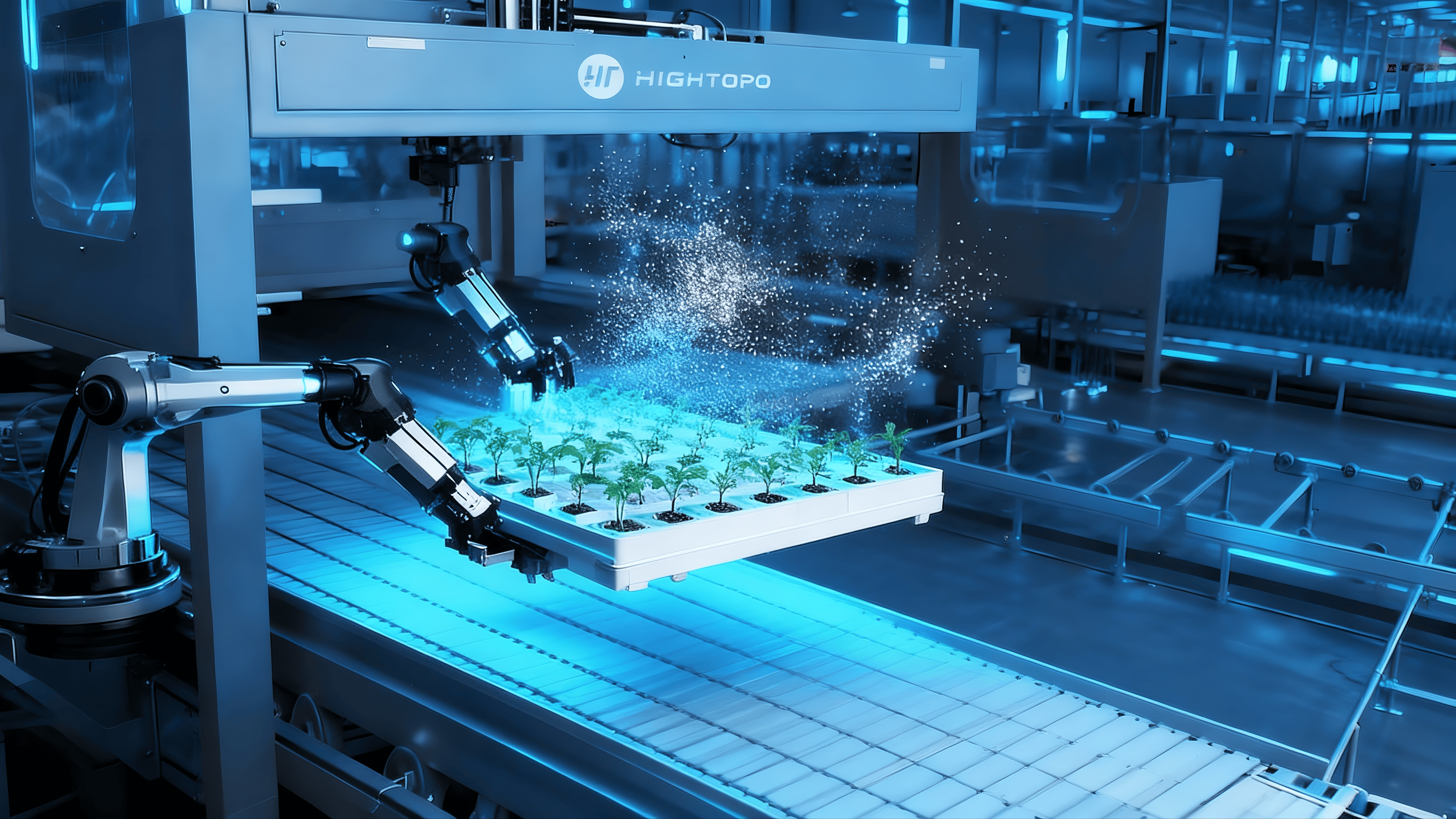
在图扑 HT 的可视化界面中,机械臂的运行轨迹会以绿色粒子流的形式呈现,若设备出现故障预警(如关节温度过高),数字空间中的机械臂模型会闪烁黄色警示,并自动推送维修建议,避免了设备停机对育苗流程的影响。
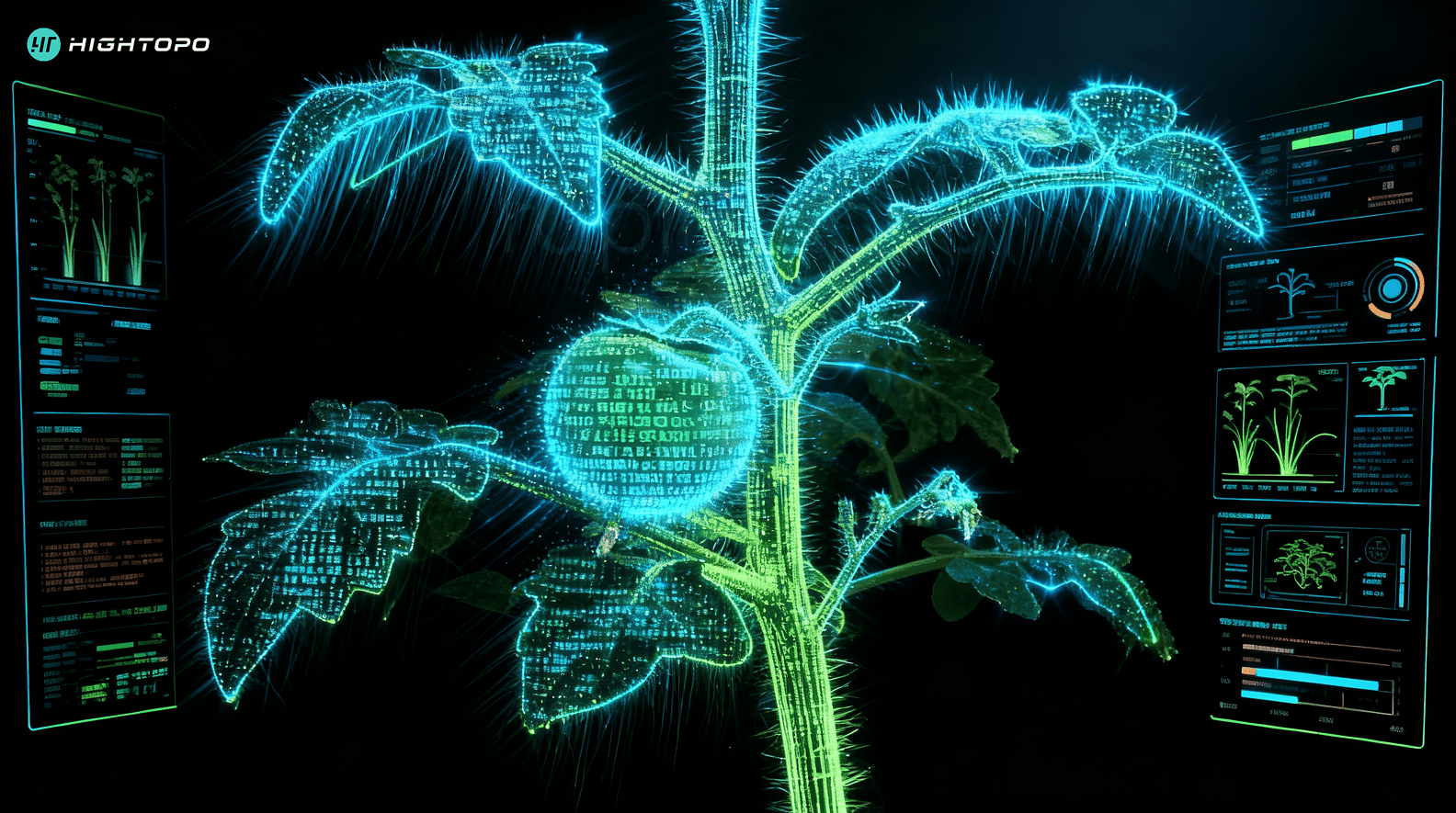
数字孪生系统的 “虚拟育种” 功能,是其区别于传统系统的关键:它会基于历史育苗数据,在数字空间中模拟不同环境参数下的幼苗生长状态。
一方面,数据的全域互联打破了设备、环境、作物之间的信息孤岛 —— 原本分散在传感器、控制器中的数据,被整合到数字空间,形成了覆盖 “育苗 - 生长 - 移栽” 全流程的数据集,让管理者能从 “单环节管理” 转向 “全链条优化”;
另一方面,虚实交互的决策模式,让 “经验驱动” 变成了 “数据驱动”—— 不再依赖技术员的个人判断,而是通过数字模型的比对、模拟,输出最优的管理方案,既提升了育种的标准化程度,也降低了对专业人员的依赖。
智慧育苗数字孪生,本质上是用 “数字生产力” 重塑了农业育种的底层逻辑:它让原本依赖自然条件、人工经验的育苗过程,变成了可控、可测、可优化的工业化流程。而图扑 HT 构建的可视化数字底座,正是这场变革的 “连接器”—— 它让物理世界的育苗场景,在数字空间中焕发了更高的效率与可能性。




