你有没有想过,为什么有的『机器人』️动作丝滑如行云流水,精准完成高速拾放、精密装配;有的却笨笨的,稍微复杂的轨迹就跟丢,一碰就晃?答案藏在一个看似抽象,却决定『机器人』️“反应速度” 的核心指标里 ——控制带宽。

它是『机器人』️控制系统的“速度天花板”,是衡量『机器人』️动态响应能力的关键,更是『机器人』️设计、调试和性能优化的核心抓手。今天就用最通俗的话,把这个频域里的硬核概念讲透,让你一眼看懂『机器人』️的 “快与准” 到底由什么决定!
一、什么是控制带宽?『机器人』️的“响应频率天花板”
控制带宽源自经典控制理论的频率响应分析,工程上的标准定义很简单:闭环控制系统频率响应的 - 3dB 点,也就是系统幅值响应衰减到约70.7% 时对应的频率。
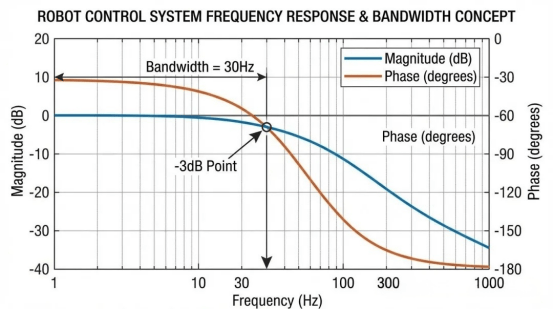
抛开拗口的专业术语,物理意义超直白:控制带宽就是『机器人』️控制系统能有效跟踪的最高指令频率。打个比方,如果一个『机器人』️位置控制系统的带宽是 30Hz,就意味着:
低于 30Hz 的运动指令,『机器人』️能精准跟上,跟踪精度至少90%;
接近 30Hz 时,『机器人』️的 “跟拍能力” 开始掉线,误差明显变大;
超过 30Hz 的高频指令,『机器人』️直接 “视而不见”,完全无法响应。
这个 - 3dB 点也对应着功率传递效率下降50% 的临界状态,有明确的数学基础,不管是实验测量还是理论计算,都能精准量化,是『机器人』️性能评估的 “硬标准”。
二、控制带宽有多重要?决定『机器人』️的“身手高低”
控制带宽不是一个孤立的数字,它直接关联着『机器人』️的响应速度、稳定性和抗扰能力,三者之间的权衡,决定了『机器人』️的实际表现。
1.带宽越高,响应越快,身手越敏捷
控制带宽和『机器人』️的时域响应速度有明确的对应关系,闭环带宽ωBW 与系统上升时间 tr 满足近似公式:tr ≈ 1.8 / ωBW。
举个例子,协作『机器人』️关节的带宽一般能到 50Hz,算下来上升时间约 5.7ms,相当于瞬间就能做出动作响应,这也是它能实现灵敏人机交互、柔顺控制的关键;而传统工业『机器人』️位置控制带宽多在 10-30Hz,上升时间 18-57ms,动作响应就会慢上一截。
简单说,带宽就是『机器人』️的“反应速度”,越高越灵敏。
2.带宽不是越高越好,稳才是第一要务
追求高带宽的同时,必须守住系统稳定性的底线,否则『机器人』️轻则动作振荡,重则直接失控。工程上对稳定性有两个硬性要求:相位裕度 45-60 度(保证阻尼充足,不晃悠)、增益裕度 12-18dB(保证对参数变化的适应能力)。
尤其是当控制带宽接近『机器人』️机械结构的谐振频率时,很容易激发结构振动,比如机械臂的连杆弯曲、关节柔性都会被放大,严重影响控制精度。高带宽是“锦上添花”,稳定性才是 “安身立命之本”。
3.带宽与抗扰的博弈:既要“抗造”,又要 “不敏感”
高带宽的控制系统,对外部扰动的抑制能力更强,比如『机器人』️碰到轻微障碍物,能快速调整姿态抵消扰动;但硬币🪙的另一面是,高带宽会放大高频测量噪声,这在力控制场景中尤为明显。
比如协作『机器人』️的力控制带宽一般设定在 20-40Hz,远低于位置控制带宽,就是为了平衡力跟踪的响应速度和力传感器的噪声抑制 —— 如果力控制带宽太高,『机器人』️会对微小的力信号过度反应,导致接触力剧烈波动,人机交互的安全性就无从谈起。
三、哪些因素在限制『机器人』️的“带宽天花板”?
『机器人』️的控制带宽不是想设多高就设多高,而是被执行器、传感器、控制算法、机械结构四大核心因素层层制约,相当于给『机器人』️的“反应速度” 套上了四层 “枷锁”。
执行器:『机器人』️的“动力心脏”,带宽的首要限制
电机和传动系统的动态响应,是决定控制带宽的第一道门槛,核心是电气时间常数和机械时间常数的博弈。
电气层面:伺服电机的电流环带宽能到 1000Hz 以上,直驱电机甚至能到数千 Hz,为高速控制打下了硬件基础;
机械层面:减速器的柔性、间隙、摩擦会带来相位滞后,机械系统的固有频率一般只有 5-20Hz,这直接成了位置控制带宽的物理上限。
而且伺服驱动器的控制环路是“级联式” 的,带宽呈数量级递减:电流环(1000Hz+)→速度环(100-200Hz)→位置环(20-50Hz),位置环最终还是被机械特性拖了后腿。

传感器:『机器人』️的“感知神经”,精度不够带宽来凑
传感器的分辨率、采样频率和信号延迟,直接决定了控制带宽的“可用上限”,相当于『机器人』️ “看不准”,自然就 “动不快”。
编码器:20-22bit 的高分辨率编码器能支持更高的速度环带宽,低分辨率的编码器在高速运动时会产生量化噪声,只能降低带宽避免振荡;
力传感器:六维力传感器固有频率 200-500Hz,但经过信号滤波和处理,实际可用带宽只剩 50-100Hz,直接限制了力控制的响应速度。
控制算法与计算性能:『机器人』️的“大脑算力”,慢一点都不行
就算硬件再好,『机器人』️的“大脑” 运算跟不上,高带宽也是空谈,核心受采样频率和算法设计影响。
采样频率:根据奈奎斯特采样定理,控制带宽不能超过采样频率的 1/5-10,现代运动控制器位置环采样频率 1-4kHz,刚好支撑数十 Hz 的位置控制带宽;
算法选择:传统 PID 结构简单但带宽受限,状态反馈控制能优化带宽与稳定性,模型预测控制(MPC)能实现更高带宽但计算量超大;
数字延迟:计算延迟、滤波器相位损失都会降低稳定裕度,好在现代多核控制器能通过并行计算缩短控制周期,提升带宽。
机械结构:『机器人』️的“身体骨架”,刚度不够全白搭
『机器人』️的机械结构特性,是控制带宽的最终物理约束,核心看惯量与刚度的耦合和谐振模态。
刚度越高,带宽越高:长臂架『机器人』️低刚度、高惯量,带宽通常低于 10Hz;SCARA 『机器人』️刚度高,带宽能到 30-50Hz;并联『机器人』️刚度最优,部分轴向带宽能超100Hz;
远离谐振频率:连杆弯曲、关节柔性会产生谐振峰,控制带宽必须远低于第一阶谐振频率(通常是 1/3-1/5),否则会引发剧烈振动,结构阻尼不足时,还得靠陷波滤波器 “压制” 特定频率。
四、不同『机器人』️的带宽特征:为啥有的快,有的慢?
不同类型的『机器人』️,应用场景不同,带宽设计也天差地别,相当于给不同“工种” 的『机器人』️定制了不同的 “反应速度”,看完你就明白它们的性能差异从何而来。
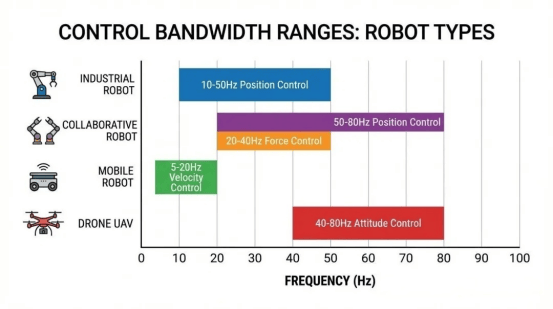
工业『机器人』️:稳字当头,带宽 10-50Hz
工业『机器人』️的位置控制带宽在 10-50Hz,六轴『机器人』️各关节带宽差异大,末端关节通常更高,而且负载变化会让带宽随工况波动 —— 轨迹精度要求高时,往往要牺牲部分带宽保稳定。
焊接、喷涂(连续轨迹):需要 30-50Hz 高带宽,保证轨迹顺滑;
搬运、码垛(点位运动):10-20Hz 就够用,主打一个稳定高效;
高速拾放:需要更高带宽,才能缩短节拍时间,提升效率。
协作『机器人』️:柔顺交互,位置 50-80Hz / 力 20-40Hz
协作『机器人』️是“高带宽代表”,位置控制带宽 50-80Hz,力控制 20-40Hz,双环结构设计只为实现柔顺的人机交互:关节力矩传感器实时反馈支持零重力模式,快速力响应能实现碰撞检测和安全停止,阻抗控制则需要位置环和力环的精准配合。
设计的核心是权衡:位置环高带宽保证轨迹精度,力环适中带宽平衡响应和稳定,避免双环之间相互干扰。
移动『机器人』️:低速稳行,带宽 5-20Hz
移动『机器人』️的速度控制带宽相对较低,只有 5-20Hz,原因很简单:轮式驱动的动态响应远不如关节伺服,地面摩擦的不确定性需要更大的稳定裕度,而且导航算法的规划周期(10-50Hz)直接决定了指令更新频率。
AGV(结构化环境):5-10Hz 就够,按固定路线走就行;
AMR(自主避障):10-20Hz,需要更灵活的响应;
高速物流『机器人』️:优化算法后局部能到 30Hz,主打一个高速高效。
无人机系统:内外分层,姿态 40-80Hz / 位置 5-15Hz
多旋翼无人机的控制系统是典型的“分层设计”,带宽差异极大:内环姿态控制需要 40-80Hz 高带宽,才能快速抑制气流扰动、实现快速机动;外环位置控制带宽只有 5-15Hz,主要配合 GPS / 视觉定位的更新频率。而高性能竞速无人机的姿态带宽能超 100Hz,这也是它能做出各种高难度飞行动作的关键。
五、怎么测『机器人』️的控制带宽?三大方法,精准量化
知道了带宽的重要性,怎么准确测量『机器人』️的实际带宽?工程上有三个标准方法,从实验室测试到实际工况,层层验证,确保数据真实有效。
正弦扫频测试:带宽测量的“标准操作”
这是最经典的带宽测量方法,步骤简单又精准:给控制系统输入幅值恒定、频率逐渐升高的正弦指令,记录实际输出的幅值和相位响应,计算各频率点的增益和相位滞后,最后绘制 Bode 图,标定 - 3dB 点对应的频率,就是实际控制带宽。
测试时要注意:扫频范围 0.1Hz 到预期带宽的 5-10 倍,每个频率点持续 10 个周期以上,正弦幅值在正常工作范围,避免『机器人』️动作饱和。
Bode 图分析:从图表里读懂『机器人』️的 “性能密码”
Bode 图是频域分析的 “万能工具”,从幅频和相频两条曲线,能读出『机器人』️的超多性能信息:
幅频特性:低频段平坦代表稳态精度高,带宽点后的衰减斜率反映系统阶次,有谐振峰说明结构有柔性或参数匹配有问题;
相频特性:带宽处的相位滞后关联相位裕度,纯延迟会让相位随频率线性下降,相位曲线越陡,系统稳定性越差。
实际工况测试:实验室数据不算数,实际表现才是真
实验室测出来的带宽,和实际应用中的有效带宽往往有差距,必须考虑负载、环境、轨迹三大因素:
负载效应:负载惯量增大会降低固有频率,负载位置变化会让惯量时变,换末端工具后甚至要重新验证带宽;
环境因素:温度变化影响电机和传动系统参数,高频背景噪声、电磁干扰会降低可用带宽,迫使降低控制增益;
轨迹复杂度:复杂轨迹包含更多高频成分,对带宽要求更高,多轴联动时带宽不匹配还会造成轮廓误差,必须验证最苛刻工况下的性能。
六、如何提升『机器人』️控制带宽?硬件 + 算法 + 集成,三管齐下
想要突破『机器人』️的带宽天花板,不是单靠升级某一个部件就行,而是需要硬件优化、算法创新、系统集成的全方位配合,工程上的实操方法都在这了。
硬件优化:给『机器人』️换“强心脏、敏神经、硬骨架”
硬件是基础,核心是提升响应速度、感知精度和结构刚度:
执行器:选高响应伺服电机、直驱电机(消除减速器影响),谐波减速器比行星减速器更优(刚度高、间隙小);
传感器:用高分辨率绝对值编码器、高固有频率低噪声力传感器,增加加速度传感器提供更多状态反馈;
结构:优化连杆截面提升弯曲刚度,用碳纤维等高刚度轻质材料,增加结构阻尼抑制谐振。
算法优化:给『机器人』️的“大脑” 升级,运算更快、决策更准
好的算法能让硬件性能发挥到极致,核心是前馈控制、状态观测器、自适应控制:
前馈控制:速度、加速度前馈减小跟踪误差,摩擦补偿前馈改善低速性能,模型前馈适配高速运动;
状态观测器:卡尔曼滤波器融合多传感器信息,扰动观测器估计外部力矩并补偿,提供高质量的速度、加速度信号;
自适应控制:增益调度根据工况自动调参数,模型参考自适应控制跟踪理想响应,神经网络辅助建模补偿非线性误差。
系统集成:让『机器人』️的“全身部件” 协同工作,无延迟
硬件和算法再好,部件之间配合不畅,还是会拖慢带宽,系统集成的核心是降低延迟、保证实时性:
控制器硬件:用多核实时处理器、FPGA 实现底层算法,EtherCAT 等高速总线减少通信延迟;
软件架构:合理分配任务优先级,优化代码减少抖动,用实时操作系统保证确定性;
系统辨识:通过频响测试辨识系统模型,用自动整定工具优化 PID 参数,建立负载 - 参数映射表实现自适应切换。
工程实战:控制带宽设计,别陷入“高带宽执念”
在实际工程应用中,控制带宽的设计从来不是“越高越好”,而是要结合应用需求、成本效益、可靠性三大因素,在多个目标之间寻求最优平衡,避免为了追求高带宽而付出不必要的代价。
先做应用需求分析:按需设计,不做无用功
先分析『机器人』️的任务轨迹频谱特性,确定所需的最低带宽;评估环境扰动的频率范围,设定抗扰带宽目标;再结合控制精度要求,找到带宽与噪声抑制的平衡点—— 比如简单的点位运动,就没必要设计高带宽,徒增成本。
做好成本效益评估:性价比才是王道
高带宽意味着高成本:直驱电机、高精度传感器的价格远高于普通部件,复杂控制算法会增加开发和维护难度。必须计算性能提升带来的收益,是否能覆盖成本投入,在性能和经济性之间找到最优解。
守住可靠性与鲁棒性:长期稳定比一时的快更重要
高带宽系统对参数变化和外部扰动更敏感,设计时必须保证充足的稳定性裕度,还要通过大量实验,验证『机器人』️在不同负载、不同环境、不同轨迹下的性能一致性—— 工业应用中,『机器人』️的长期稳定运行,远比一时的高响应速度更重要。
技术发展趋势:更高带宽、更鲁棒,『机器人』️越来越“聪明”
随着控制理论和硬件技术的不断进步,『机器人』️的控制带宽还在持续提升,未来的发展方向主要集中在三大方面:
硬件技术推动:高性能伺服驱动器集成先进算法,MEMS 传感器小型化、高采样率、低延迟,边缘计算平台让复杂算法能实时运行;
控制理论创新:基于学习的控制方法能自动优化参数,鲁棒控制技术增强对不确定性的适应能力,分布式控制架构支持模块化和可扩展性;
应用场景驱动:高速拾放、精密装配要求更高的位置带宽,人机协作、柔顺操作需要更高的力控制带宽,动态环境自主导航推动移动『机器人』️带宽提升。
七、结语:控制带宽,是『机器人』️性能的“综合体现”
控制带宽从来不是一个孤立的指标,它是『机器人』️执行器、传感器、控制算法、机械结构四大核心部件协同能力的综合体现,直接决定了『机器人』️的反应速度、稳定性和实际应用表现。
搞懂控制带宽的物理本质,掌握它的测试方法和优化策略,才能真正做好『机器人』️的设计、调试和性能优化。而在工程实践中,真正的高手从不会盲目追求高带宽,而是根据应用场景,在性能、稳定性、成本之间找到最优平衡—— 这,才是『机器人』️控制的核心精髓。
未来,随着技术的不断进步,更高带宽、更强鲁棒性的『机器人』️控制系统,必将支撑起更多复杂、高性能的应用场景,让『机器人』️在工业生产、人机协作、智能导航等领域发挥更大的作用!




